 CyKor, Korea University Hacking Club
CyKor, Korea University Hacking Club
DEFCON 33 CTF Write-Up Series #4: im‑pio‑sible (misc)
Hello, I’m Seohyun Jang, also known as d1n0.
In this post I’ll share my write‑up for the im‑pio‑sible challenge, one of the challenges I solved in this year’s DEFCON CTF qualifiers.
terms
The challenge is based on a custom PIO system written by the authors. To make the explanation clearer, I’ll start by summarizing a few key terms of this PIO model.
State Machinesexecute the instruction at their PC every tick, one after another.- The supported instructions are
Jmp,Wait,In,Out,Pull,Push,Mov,Irq, andSet.
Each instruction can include asidesetfield that either inserts an extra delay or sets a value on a GPIO pins. - Every State Machine owns these memory areas:
- Output Shift Register (OSR)
Filled byOutandPull; also accessible withMovorSet.
Theout_shiftdirflag selects the shift‑in direction forOut. - Input Shift Register (ISR)
Filled byInandPush; likewise accessible withMovorSet.
Thein_shiftdirflag selects the shift‑in direction forIn. - Shift Counters (OSC / ISC)
Count the number of bits shifted through OSR/ISR and are mainly used to triggerautopullorautopush. - Scratch X, Scratch Y: general temporary registers, also used as loop counters by
Jmp. - TX FIFO: values written by
Pushare placed here. - RX FIFO:
Pullreads values from here.
- Output Shift Register (OSR)
- GPIO
Can be used byIn,Out,Mov, or viasideset.
Ifshare_pinsistrue, all State Machines share the same GPIO pins.
For details not covered here, please consult the Swift source code shipped with the problem.
im‑pio‑sible
The challenge provided a single transmitter State Machine.
Our task is to build a receiver State Machine that runs concurrently, recovers each value the transmitter pops from its TX queue, and then pushes that value to our TX queue.
The transmitter’s TX FIFO is wired to the receiver’s RX FIFO. And the receiver may also watch any GPIO activity driven by the transmitter if share_pins option is true.
There are three transmitter variants—level 1, level 2, and level 3—but during the CTF I only implemented a receiver for level 3.
Special thanks to the Cold Fusion members deayzl and Aplace, who solved levels 1 and 2 and explained the challenge in detail.
Because this write‑up aims to be complete, I will still present solutions for levels 1 and 2. I have cleaned up the explanations slightly, so they may differ from the code we actually ran during the contest.
Level 1
gpio_pins: 2
gpio_pindir: 2
out_shiftdir: true
pull_thresh: 32
auto_pull: false
out_base: 0
side_base: 1
sideset_count: 2
side_en: true
share_pins: true
PULL if_empty=0, block=1; sideset=31;
SET dest=1, data=15; sideset=23;
OUT GPIO (1); sideset=30;
JMP X-- > 0 ? 2; sideset=17;
level1.json performs these steps:
Pullone word from TX FIFO.- Load
15into scratchX. - Shift one bit from OSR out to GPIO.
- If
X> 0, jump back to step 2; otherwise, jump to step 0.Xis decremented just before the jump.
When the transmitter executes the Out, the receiver must execute an In, but only after the Out fires.
Because Out is issued with sideset 30, GPIO shows 1 1 [out‑bit] right after the instruction.
By first clearing GPIO and waiting until pin 1 goes high, the receiver can detect that exact moment.
After the transmitter finishes its loop it restarts from the beginning.
To stay in sync, the receiver waits until the transmitter runs its Jmp (sideset 17 clears pin 1).
With push_thresh = 16 and autopush = true, the receiver’s OSC hits the threshold at the end of each inner loop, automatically pushing the reconstructed word.
share_pins: true
in_shiftdir: true
autopush: true
push_thresh: 16
SET dest=0, data=0; sideset=0;
WAIT idx=1, src=0, pol=1; sideset=0;
SET dest=1, data=15; sideset=0;
SET dest=0, data=0; sideset=0;
WAIT idx=1, src=0, pol=1; sideset=0;
GPIO |> ISR (1); sideset=0;
JMP X-- > 0 ? 3; sideset=0;
WAIT idx=1, src=0, pol=0; sideset=0;
JMP TRUE ? 0; sideset=0;
Level 2
push_thresh: 32
set_base: 14
share_pins: true
PULL if_empty=0, block=1; sideset=0;
MOV X <- OSR; sideset=0;
MOV ISR <- OSR; sideset=0;
PUSH if_full=0, block=0; sideset=0;
PULL if_empty=0, block=1; sideset=0;
MOV Y <- OSR; sideset=0;
JMP TRUE ? 8; sideset=0;
JMP X-- > 0 ? 8; sideset=0;
JMP Y-- > 0 ? 7; sideset=0;
MOV INVERT ISR <- X; sideset=0;
PUSH if_full=0, block=0; sideset=0;
SET dest=0, data=1; sideset=0;
WAIT idx=14, src=0, pol=0; sideset=0;
level2.json does the following:
PullwordA.- Copy OSR into scratch
X. - Copy OSR into ISR.
PushISR (→ sendsA).PullwordBinto OSR.- Store OSR in scratch
Y. - Jump to step 8.
- If
X != 0, decrementXand jump to step 8. - If
Y != 0, decrementYand jump to step 7. - Store
~Xin ISR. - Push ISR (→ sends
~(A − B)). - Using
set_base = 14, set GPIO 14 high (stop bit). - Wait until GPIO 14 returns to 0.
Thus the transmitter reads A, B and outputs A followed by ~(A − B).
Given A and ~(A − B), the receiver can recover both numbers.
By exploiting the same Jmp X--/Jmp Y-- trick used by the transmitter—compute (A‑B) − A − 1, invert—we recover B.
After both pushes, the receiver clears GPIO 14 so that the transmitter can continue.
set_base: 14
share_pins: true
PULL if_empty=0, block=1; sideset=0;
MOV X <- OSR; sideset=0;
PULL if_empty=0, block=1; sideset=0;
MOV Y <- OSR; sideset=0;
MOV ISR <- X; sideset=0;
PUSH if_full=0, block=0; sideset=0;
MOV INVERT Y <- Y; sideset=0;
JMP Y-- > 0 ? 8; sideset=0;
JMP X-- > 0 ? 7; sideset=0;
MOV INVERT ISR <- Y; sideset=0;
PUSH if_full=0, block=0; sideset=0;
SET dest=0, data=0; sideset=0;
Level 3
in_shiftdir: false
out_shiftdir: false
set_base: 29
PULL if_empty=0, block=1; sideset=0;
OUT GPIO (32); sideset=0;
GPIO |> ISR (2); sideset=0;
MOV Y <- ISR; sideset=0;
JMP Y-- > 0 ? 4; sideset=5;
SET dest=0, data=0; sideset=0;
GPIO |> ISR (32); sideset=0;
MOV GPIO <- 0; sideset=0;
PUSH if_full=0, block=1; sideset=10;
level3.json works as follows:
Pullone word from TX FIFO.- Drive all 32 bits onto GPIO.
- Read the lower two GPIO bits into ISR.
- Copy ISR into scratch
Y. - While
Y > 0, loop here, decrementingYeach time.
Because the instruction has sideset 5, each iteration waits 5 ticks
(side_endefaults tofalse, so every instruction outputs its sideset). - Clear the lower two GPIO bits (
set_base = 29). - Read 32 bits from GPIO into ISR.
- Clear GPIO pins.
PushISR into RX FIFO.
The big difference from previous levels is that share_pins is off, so the receiver cannot directly read transmitter’s GPIO pins.
The transmitter zeroes the two LSBs of every word before sending; those bits affect only the loop length in step 4.
This allows a timing attack: a larger 2‑bit value means the transmitter waits longer before its next Push.
The receiver sets block = 0 on its own Pull and counts cycles while the TX FIFO is empty to recover those two bits.
Since there is no instruction that adds 1, we recycle the trick from level 2: invert, subtract 1 via Jmp X--, then invert again effectively adds 1.
The diagram below shows the flow:
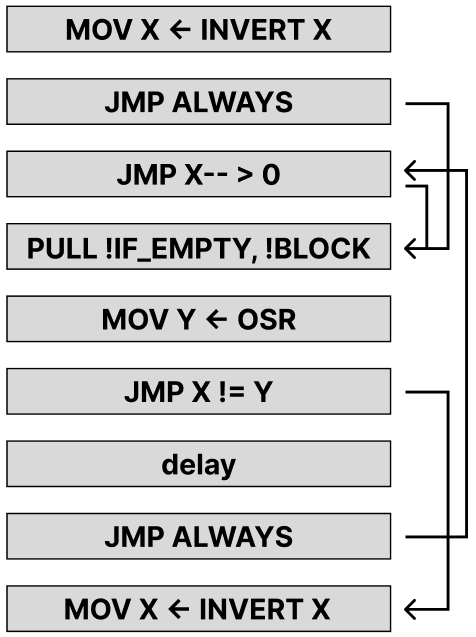
Next we need to recombine the recovered 2 bits with the remaining 30 bits.
Because the level 2’s loop‑counter trick changes the number of executed instructions, we want a reconstruction method whose instruction count is constant.
Using In and Out fits perfectly:
- Set
in_shiftdir = 0andout_shiftdir = 1. PullwordYinto ISR.Outthe lower two bits; ISR now holdsY >> 2.- Shift the recovered two bits into ISR with
In; ISR becomes
(Y & ~0b11) | (X & 0b11)—exactly the original word.
The complete receiver for level 3 is:
in_shiftdir: false
out_shiftdir: true
SET dest=1, data=0; sideset=0;
SET dest=2, data=0; sideset=0;
MOV ISR <- X; sideset=0;
MOV OSR <- X; sideset=0;
OUT GPIO (32); sideset=0;
MOV X <- X; sideset=6;
MOV INVERT X <- X; sideset=0;
JMP TRUE ? 9; sideset=0;
JMP X-- > 0 ? 9; sideset=0;
PULL if_empty=0, block=0; sideset=0;
MOV Y <- OSR; sideset=0;
JMP X != Y ? 14; sideset=0;
MOV X <- X; sideset=0;
JMP TRUE ? 8; sideset=0;
MOV INVERT X <- X; sideset=0;
MOV OSR <- Y; sideset=0;
OUT GPIO (2); sideset=0;
MOV ISR <- OSR; sideset=0;
X |> ISR (2); sideset=0;
PUSH if_full=0, block=1; sideset=0;
JMP TRUE ? 0; sideset=0;
Conclusion
You can find the solution script below:
def Jmp(addr: int, mode: int, sideset: int = 0) -> tuple[int, int]:
return (addr & 0x1F) | (mode << 5), (0 << 5)
def Wait(index: int, source: int, pol: int, sideset: int = 0) -> tuple[int, int]:
assert source < 4
assert pol < 2
return ((index & 0x1F) | (source << 5) | (pol << 7), (1 << 5) | (sideset & 0x1F))
def In(src: int, bitcount: int, sideset: int = 0) -> tuple[int, int]:
assert src <= 7
return (src << 5) | (bitcount & 0x1F), (2 << 5) | (sideset & 0x1F)
def Out(dest: int, bitcount: int, sideset: int = 0) -> tuple[int, int]:
assert dest <= 7
return (dest << 5) | (bitcount & 0x1F), (3 << 5) | (sideset & 0x1F)
def Pull(if_empty: int, block: int, sideset: int = 0) -> tuple[int, int]:
assert if_empty < 2 and block < 2
return (if_empty << 6) | (block << 5) | (1 << 7), (4 << 5) | (sideset & 0x1F)
def Push(if_full: int, block: int, sideset: int = 0) -> tuple[int, int]:
assert if_full < 2 and block < 2
return (if_full << 6) | (block << 5), (4 << 5) | (sideset & 0x1F)
def Mov(src: int, cal: int, dest: int, sideset: int = 0) -> tuple[int, int]:
assert src <= 7
assert cal <= 3
assert dest <= 7
return src | (cal << 3) | (dest << 5), (5 << 5) | (sideset & 0x1F)
def Irq(clr: int, wait: int, index: int, sideset: int = 0) -> tuple[int, int]:
return (clr << 6) | (wait << 5) | (index & 0x1F), (6 << 5) | (sideset & 0x1F)
def Set(dest: int, data: int, sideset: int = 0) -> tuple[int, int]:
return (dest << 5) | (data & 0x1F), (7 << 5) | (sideset & 0x1F)
from pwn import *
# r = remote('localhost', 1337)
# r.sendlineafter(b": ", b"ticket{TICKET}")
r = process("./challenge", env={"LD_LIBRARY_PATH":"./lib/"})
inst = [
*Set(0, 0),
*Wait(1, 0, 1),
*Set(1, 15),
*Set(0, 0),
*Wait(1, 0, 1),
*In(0, 1),
*Jmp(3, 2),
*Wait(1, 0, 0),
*Jmp(0, 0),
]
payload_1 = '{"sh":1,"isd":1,"as":1,"ps": 16,'+f'"i":{inst}'+'}'
r.sendlineafter(b"level 1", payload_1.encode())
inst = [
*Pull(0, 1),
*Mov(7, 0, 1),
*Pull(0, 1),
*Mov(7, 0, 2),
*Mov(1, 0, 6),
*Push(0, 0),
*Mov(2, 1, 2),
*Jmp(8, 4, 0),
*Jmp(7, 2, 0),
*Mov(2, 1, 6),
*Push(0, 0),
*Set(0, 0),
]
payload_2 = '{"seb":14,"sh":1,'+f'"i":{inst}'+'}'
r.sendlineafter(b"level 2", payload_2.encode())
inst = [
*Set(1, 0),
*Set(2, 0),
*Mov(1, 0, 6),
*Mov(1, 0, 7),
*Out(0, 0),
*Mov(1, 0, 1, 6),
*Mov(1, 1, 1),
*Jmp(9, 0),
*Jmp(9, 2),
*Pull(0, 0),
*Mov(7, 0, 2),
*Jmp(14, 5, 2),
*Mov(1, 0, 1),
*Jmp(8, 0),
*Mov(1, 1, 1),
*Mov(2, 0, 7),
*Out(0, 2),
*Mov(7, 0, 6),
*In(1, 2),
*Push(0, 1),
*Jmp(0, 0),
]
payload_3 = '{"isd":0,"osd":1,'+f'"i":{inst}'+'}'
r.sendlineafter(b"level 3", payload_3.encode())
r.interactive()